
The Point pair relation calculation type calculates some key figures that describe the spatial relation of two points on the surface of the earth that are continuously monitored. The two points are represented as features of feature type 3D movement.
Since the feature type 3D movement can only be located in projected coordinate systems and since the observations' X, Y; and Elevation properties are interpreted in the projected coordinate system the feature uses, this calculation uses trigonometry to calculate the key figures.
Characteristic |
Description |
Supports incremental execution |
Yes |
Output typing |
Explicit: Point pair relation |
Locking of source features |
Observation modification, observation deletion |
Copy |
Table 1: Calculation brief
No |
Name |
Type, Constraint, Notes |
Multiplicity (Min,Max) |
1 |
3D Movement 1 |
Features or calculations |
1, 1 |
2 |
3D Movement 2 |
Features or calculations |
1, 1 |
Table 2: Input pins
Configuration |
Type |
Notes |
Default value |
Include Erroneous |
Boolean |
If set to true, erroneous observations of the source feature or calculation will be processed. |
True |
Search Epsilon |
Numeric |
Defines the search Epsilon in Seconds that is used to find a correlating observation, |
0 |
Table 3: Configuration settings
The calculation is performed on corresponding pairs of observations from two Features or calculations (Feature 1 connected to pin 1 and feature 2 connected to pin 2).
For each observation in Feature 1 the calculation searches for a corresponding observation in Feature 2. This is done by getting the observation in Feature 2 that is nearest to the observation in feature 1 (in terms of sampling timestamp) and that is in the specified Epsilon search environment of the sampling timestamp of the feature of Feature 1.
If no corresponding observation is found for an observation of Feature 1 the output will not contain an observation with that sampling timestamp.
|
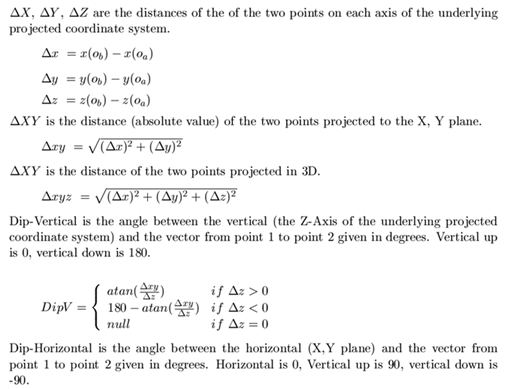
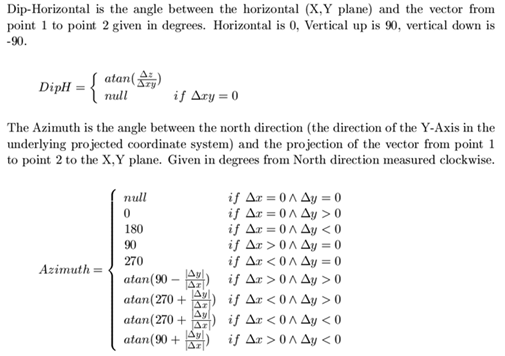
Figure 1: Details about the calculation
